
Activer le mode zen
Ressource au format PDF
Mots-clés
Classification
Peut-on créer un luminance-mètre précis à partir du moteur Mendocino ?
12/02/2024
Ce travail a été réalisé à l'ENS de Lyon dans le cadre du Tournoi international de physique (IPT 2023), encadré par Nicolas Taberlet, Nicolas Plihon et Hugo Roussille.
Table des matières
Introduction
Le moteur Mendocino est un moteur fonctionnant à l'aide de panneaux solaires. Cependant, contrairement à un moteur électrique classique qui serait alimenté par les panneaux solaires, les panneaux sont ici une partie intégrante du moteur et tournent donc avec lui. Cela ne présente pas d'avantage particulier par rapport à un moteur classique mais c'est un objet amusant que nous avons étudié dans le cadre de l'IPT (International Physicists' Tournament) 2023.
 Figure 1. Moteur Mendocino Source : handsmagic.cc |
Remarque :
La luminance est une mesure de l'éclairement (en W/m2) liée à la sensibilité spectrale de l'œil humain de sorte à quantifier la sensation de lumière. La réponse spectrale d'un panneau solaire n'étant à priori pas la même que celle d'un oeil humain, on ne peut pas à proprement parler créer un luminance-mètre, mais on peut mesurer l'éclairement pour une source de lumière fixée ayant une composition spectrale fixée, typiquement un corps noir comme le soleil.
1. Description générale
Un moteur Mendocino est généralement constitué de 4 panneaux photovoltaïques qui alimentent 2 bobines, le tout monté sur un axe pivotant au-dessus d'un aimant, figure 2. En raison du faible couple généré, l'axe pivotant est généralement suspendu magnétiquement afin de réduire au maximum les frottements.
Lorsque le moteur est placé au soleil, ou sous une source lumineuse suffisamment intense, il se met à tourner.
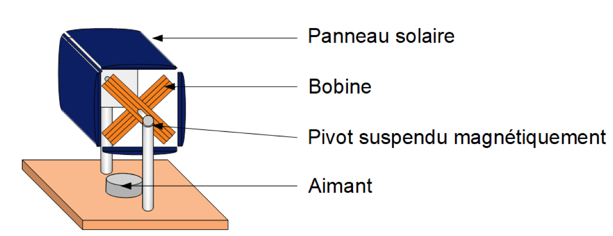 Figure 2. Schéma des éléments composants un moteur Mendocino Source : Amaury Marchon et Rémy Dolbeault |
2. Principe de fonctionnement
De façon à expliquer simplement le fonctionnement du moteur, nous ne prendrons pas en compte les formes réelles des champs magnétiques en jeu mais des approximations : champ dipolaire pour les bobines et champ constant pour l'aimant permanent.
Afin de comprendre l'origine de la rotation du moteur, considérons d'abord le panneau placé horizontalement, figure 3. On suppose que la lumière vient du dessus en rayons parallèles de sorte que seul ce panneau soit éclairé.
Le panneau photovoltaïque reçoit un flux de lumière, il y a donc apparition d'une différence de potentiel à ses bornes. Comme il est connecté à une bobine, un courant peut circuler dans ce circuit. La bobine, traversée par ce courant crée un champ magnétique, dont le moment magnétique est représenté par une flèche rouge sur la figure 3.
L'aimant au-dessous de la bobine est fixe. Son champ magnétique va induire un couple qui va s'exercer sur l'axe de la bobine (qui est l'axe de rotation du moteur). L'axe de la bobine va chercher à s'aligner avec le champs magnétique de l'aimant permanent et faire tourner le moteur dans le sens trigonométrique sur notre schéma.
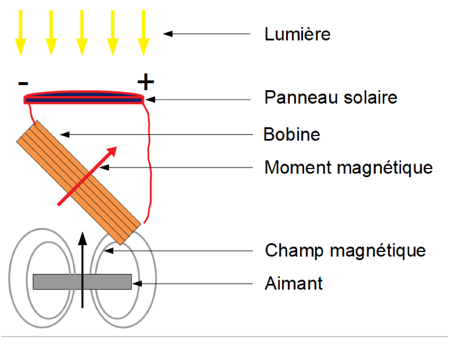 Figure 3. Le panneau solaire éclairé est branché à une bobine qui crée un champ magnétique Source : Amaury Marchon et Rémy Dolbeault |
Une fois que ce premier panneau solaire a commencé sa rotation, figure 4, il reçoit un éclairement moindre, du fait de son inclinaison, donc le courant traversant la première bobine diminue ainsi que son moment magnétique (représenté en rouge). C'est le deuxième panneau (représenté en vert) qui va se retrouver sous la source de lumière, poursuivant, de la même manière, le mouvement de rotation, les deux bobines étant solidaires et fixées à l'axe de rotation du moteur.
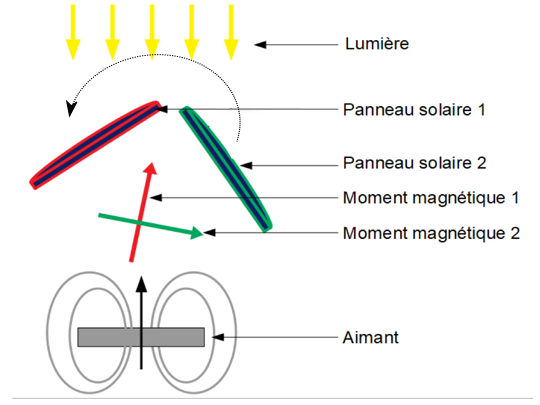 Figure 4. Rotation des bobines et des panneaux solaires Dans ce schéma seuls les moments magnétiques des bobines sont représentés. Source : Amaury Marchon et Rémy Dolbeault |
On peut maintenant quantifier le couple qui s'applique sur l'axe de rotation du moteur.
On note :
- \(l^2\) la surface d'un panneau photovoltaïque,
- \(\theta\) l'angle entre la normale au panneau rouge et la verticale (figure 5),
- \(I\) l'intensité du courant électrique dans la bobine,
- \(N\) le nombre de spires de la bobine et \(a^2\) leur surface,
On suppose que \(I\) est proportionnel à la surface éclairée du panneau, donc \(I \approx l^2 \cos \theta\)
On a donc : \(I \approx I_0 \cos \theta\)
On note \(m\) le moment magnétique de la bobine, \(m = N a^2 I_0 \cos \theta\)
On suppose pour simplifier que le champ magnétique de l'aimant fixe est constant d'intensité \(B\).
Le couple qui s'éxerce sur l'axe de rotation du moteur est donc : \(\Gamma_1 = N a^2 I_0 B \cos \theta \sin \big( \frac{\pi}{2} - \theta \big) \)
De même, lorsque le moteur a commencé à tourner, le panneau de droite (en vert sur la figure 5) vient se placer sous la source lumineuse et alimente alors la deuxième bobine, ce qui génère un couple : \(\Gamma_2 = N a^2 I_0 B \sin \theta \cos \big( \frac{\pi}{2} - \theta \big) \)
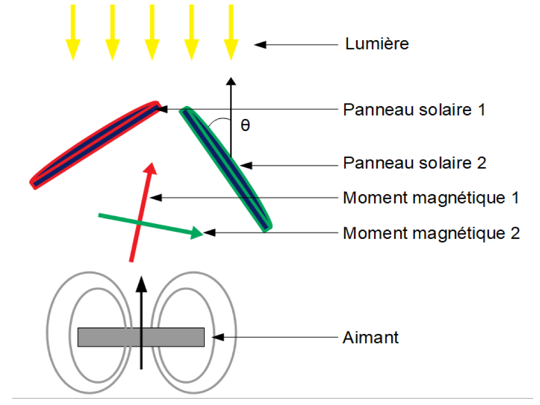 Figure 5. Rotation des deux panneaux solaires Source : Amaury Marchon et Rémy Dolbeault |
Les deux derniers panneaux sont branchés de manière symétrique de sorte que lorsque le moteur a réalisé un quart de tour, on retrouve la même situation qu'au départ et le couple total du moteur est donc la somme des deux précédents.
Les figures 6 à 8 présentent les couples créés par les bobines alimentées par le panneau 1 (en rouge), le panneau 2 (en vert) et la somme des deux (en noir).
Au total on a donc un couple moteur :
\( \boxed{ \Gamma_{mot} = \Gamma_1 + \Gamma_2 = N a^2 I_0 B \sin \big( \frac{\pi}{4} \big) = \frac{1}{\sqrt{2}} N a^2 I_0 B }\)
qui ne dépend donc pas de l'angle \(\theta\). Le couple moteur est donc constant au cours de la rotation !
3. Régime stationnaire
Pour construire un luminance-mètre, on va chercher à relier la vitesse de rotation du moteur à l'éclairement. On pourrait simplement étalonner le moteur à partir d'une source lumineuse d'intensité variable, mais on va commencer par chercher une relation explicite.
On observe expérimentalement que le moteur atteint rapidement un état stationnaire, dans lequel il tourne à une vitesse constante. Or on a vu que le moteur produit un couple constant, donc il doit y avoir des frottements qui empêchent le moteur d'accélérer indéfiniment en équilibrant l'équation du mouvement.
À l'équilibre, on doit avoir \(\Gamma_{mot} = \Gamma_{frott} (\omega)\) où le couple de frottement dépend de la vitesse de rotation.
L'axe de rotation est suspendu magnétiquement mais contient tout de même un point de contact où a lieu un frottement solide. Ce frottement est constant, indépendant de la vitesse de rotation et ne peut donc pas suffire. Le frottement de l'air, bien que complexe à modéliser, dépend de la vitesse de rotation et pourrait donc compléter l'équation du mouvement.
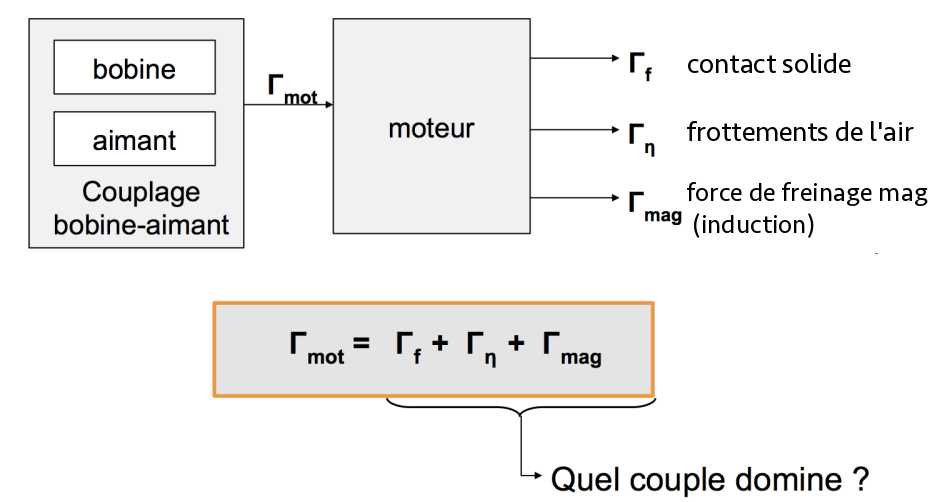 Figure 9. Régime stationnaire du moteur Source : Amaury Marchon et Rémy Dolbeault |
Pour mesurer les forces de frottement en jeu, on fait tourner le moteur puis on s'intéresse à la vitesse à laquelle il ralentit, en l'absence de lumière, figure 10.
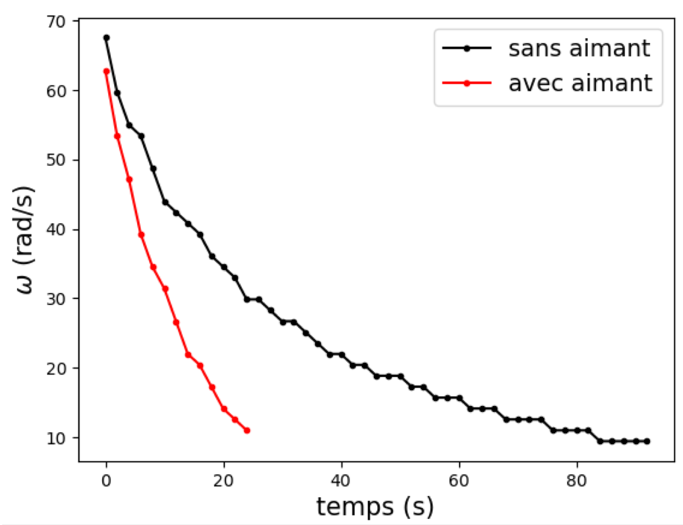 Figure 10. Vitesse de rotation du moteur au cours du temps Source : Amaury Marchon et Rémy Dolbeault Le moteur n'est pas éclairé. Il est initialement lancé à la main et il ralentit en raison des frottements. |
On remarque ainsi (figure 10) que le moteur met beaucoup plus de temps à s'arrêter si on lui retire son aimant permanent. Cela laisse donc supposer qu'un freinage magnétique entre en jeu et domine le freinage aérodynamique. En effet, le moteur étant principalement constitué de bobines qui se déplacent dans un champ magnétique, des courants induits doivent apparaître qui s'opposent au mouvement.
Estimons ce couple de freinage magnétique. Le flux du champ magnétique à travers une bobine est :
\(\Phi_{1} = N B a^2 \cos (\theta)\)
Cela induit donc un courant : \(I = \frac{1}{r_b} \frac{d \Phi}{d t} = \omega \frac{N B}{r_b} a^2 \sin (\theta)\)
où \( \omega \) est la vitesse de rotation du moteur (constante en régime stationnaire) et \( r_b \) est la résistance de la bobine.
Ce courant induit génère donc un moment magnétique induit :
\(m_{induit} = I N a^2 = \omega \frac{N^2 B}{r_b} a^4 \sin (\theta)\)
Ce moment magnétique est placé dans le champ magnétique B et génère donc un couple. Pour la bobine 1 :
\(\Gamma_{mag1} = \lvert \overrightarrow{m_{induit}} \times \overrightarrow{B} \rvert = \omega \frac{N^2 B^2}{r_b} a^4 \sin (\theta)^2\)
La seconde bobine est placée en θ + π/2 et génère donc un couple :
\(\Gamma_{mag2} = \lvert \overrightarrow{m_{induit}} \times \overrightarrow{B} \rvert = \omega \frac{N^2 B^2}{r_b} a^4 \cos (\theta)^2\)
Le couple total de freinage magnétique est donc :
\(\Gamma_{mag} = \Gamma_{mag1} + \Gamma_{mag2} = \omega \frac{N^2 B^2}{r_b} a^4 \)
On a donc à l'équilibre :
\( \boxed{ \Gamma_{mot} = \Gamma_{mag}} \)
C'est-à-dire :
\(\frac{1}{\sqrt{2}} N a^2 I_0 B = \omega \frac{N^2 B^2}{r_b} a^4 \)
Donc la vitesse de rotation est imposée par :
\( \boxed{ \omega = \frac{1}{\sqrt{2}} \frac{I_0 r_b}{N a^2 B} } \)
4. Caractéristique courant-tension
On cherche maintenant un lien entre l'intensité lumineuse et la vitesse de rotation du moteur. On va donc à présent caractériser la réponse des panneaux, c'est-à-dire déterminer l'intensité du courant en fonction de l'éclairement E.
Pour cela, on doit mesurer l'intensité du courant débité par un panneau solaire à différents éclairements. Nous avons obtenus ces différents éclairements à l'aide d'un spot lumineux de puissance variable dont nous avons mesuré l'éclairement à l'aide d'un luxmètre. Malheureusement, un luxmètre ne donne pas une valeur de E en W/m2 comme on le souhaite mais en lux. En fait, plus que la valeur exacte de l'intensité I en fonction de l'éclairement E, c'est la manière dont I varie en fonction de E qui nous intéresse donc on peut se permettre de mesurer l'éclairement en unité arbitraire E0.
Nous avons ainsi réalisé trois mesures de courant aux trois éclairements E0, 3,5E0 et 8E0.
Comme l'intensité du courant débité par le panneau solaire ne dépend pas seulement de l'éclairement lumineux mais aussi de la résistance du circuit dans lequel il est branché, on réalise les mesures d'intensité pour plusieurs valeurs de résistance. On mesure donc la tension U aux bornes d'une résistance variable branchée au panneau solaire pour différentes valeurs de résistance R et on en déduit la valeur de l'intensité du courant à travers la relation U = RI.
 Figure 11. Schéma du montage pour obtenir la caractéristique courant-tension des panneaux solaires Source : Amaury Marchon et Rémy Dolbeault |
La figure 12 présente le diagramme courant-tension pour les différents éclairements E0, 3,5E0 et 8E0.
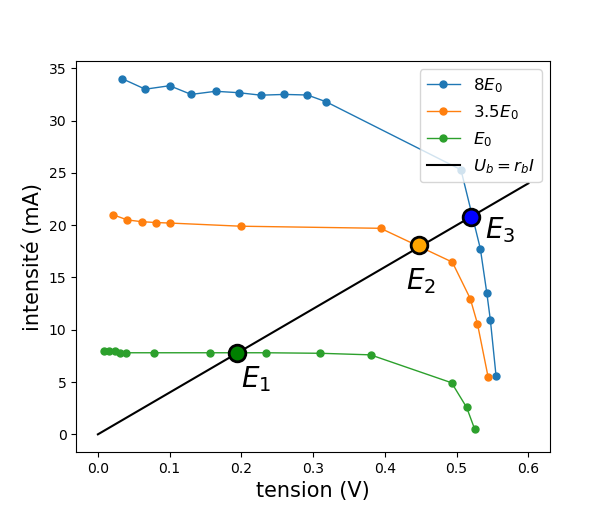 Figure 12. Diagramme courant-tension pour un panneau solaire avec trois éclairements différents Source : Amaury Marchon |
Chaque panneau photovoltaïque étant branché aux bornes d'une bobine de résistance rb en régime quasi-permanent, cela impose Ub = rbI à ses bornes.
Les points de fonctionnement correspondent donc aux croisements entre la droite Ub = rbI et les courbes correspondant aux éclairements E0, 3,5E0 et 8E0, soit aux trois points E1, E2 et E3.
On remarque que l'intensité du courant I n'est pas proportionnelle à l'éclairement E puisque lorsque l'éclairement augmente, passant de E0, 3,5E0 et 8E0, l'intensité du courant passe d'environ 8 mA à 18 mA puis seulement de 18 mA à environ 21 mA. On observe donc un plafonnement de l'intensité du courant autour d'un peu plus de 21 mA qui doit induire un plafonnement de la vitesse de rotation.
5. Mesures de vitesse de rotation et d'intensité lumineuse
Si on ne parvient pas à obtenir de relation analytique liant la vitesse de rotation du moteur à l'éclairement, on peut simplement mesurer l'un en fonction de l'autre puis utiliser le graphe ainsi obtenu comme référence pour déduire l'éclairement de la vitesse de rotation.
On mesure la vitesse de rotation à l'aide d'une diode laser qui illumine un coin du moteur. Lorsque le moteur est penché d'un angle θ = π/4 (modulo π/2) il bloque le passage du faisceau laser, sinon, le faisceau vient éclairer un photo-détecteur. On détecte ainsi quatre signaux par période. En branchant le photo-détecteur sur un oscilloscope on peut ainsi mesurer précisément la vitesse de rotation du moteur, figure 13.
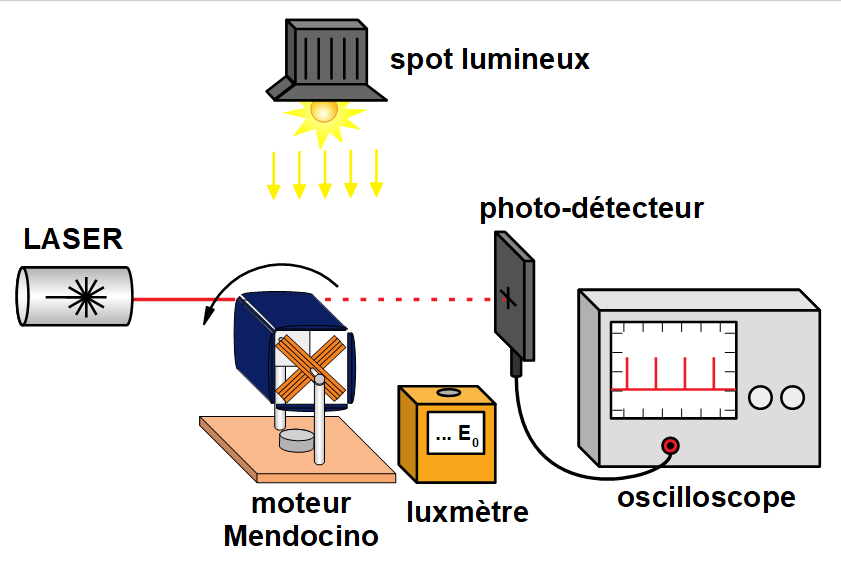 Figure 13. Mesures expérimentales de la vitesse de rotation du moteur pour différents éclairements Source : Amaury Marchon |
On mesure la vitesse de rotation du moteur en régime stationnaire pour différents éclairements et on obtient le graphe, figure 14.
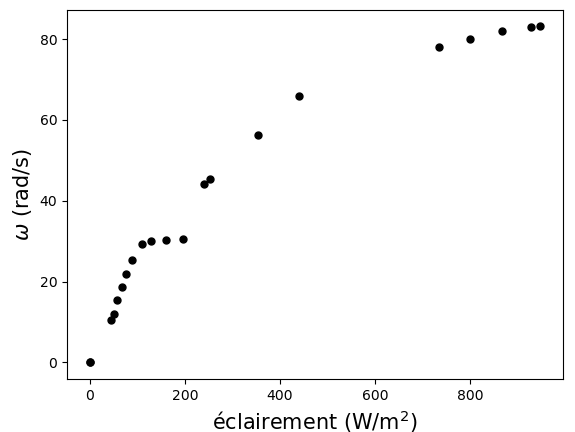 Figure 14. Vitesse de rotation du moteur en fonction de l'éclairement Source : Amaury Marchon et Rémy Dolbeault |
On observe bien, comme prévu, un plafonnement aux hauts éclairements dû au fonctionnement des panneaux photovoltaïques.
On remarque de plus un plateau imprévu à ω = 30 rad/s. Cela correspond en fait à la fréquence propre des oscillations mécaniques du moteur : à cette pulsation, les oscillations de l'axe de rotation du moteur entrent en résonance avec sa rotation ; le moteur se met alors à vibrer, ce qui dissipe toute l'énergie supplémentaire que l'on apporte en augmentant l'éclairement et fixe donc sa vitesse de rotation.
Ce phénomène est problématique si l'on souhaite déduire l'intensité lumineuse de la mesure de la vitesse de rotation du moteur mais on peut l'éviter en ne mesurant que des éclairements dans la gamme 0 – 100 W/m2 où l'on a une relation quasi-linéaire. On peut s'assurer de toujours se placer dans cette gamme d'éclairements en utilisant des filtres.
Conclusion
La grande précision sur la mesure de la vitesse de rotation du moteur permet d'obtenir une bonne précision sur la valeur de l'éclairement. Dans le cas de notre étude, on a atteint une précision de 0,1 rad/s sur la vitesse de rotation, ce qui donne une précision de 0,3 W/m2 sur l'éclairement.
Pour citer cet article :
Peut-on créer un luminance-mètre précis à partir du moteur Mendocino ?, Amaury Marchon, Rémy Dolbeault, février 2024. CultureSciences Physique - ISSN 2554-876X, https://culturesciencesphysique.ens-lyon.fr/ressource/Mendocino-IPT.xml