
Activer le mode zen
Ressource au format PDF
Mots-clés
Classification
Création d'un chariot piloté par un microcontrôleur Arduino, pour illustrer la relativité du mouvement selon Galilée
24/06/2024
Table des matières
1. Problématique : Comment savoir si un véhicule est en mouvement en faisant tomber un objet ?
Au début du XVIIe siècle, Galilée essaie de faire passer ses idées sur l'héliocentrisme sans trop se compromettre. Il imagine un dialogue entre plusieurs personnages (Simplicio et Salvati).
À l'époque de Galilée, un des arguments contre le modèle héliocentrique était que si la terre est en mouvement, on devait forcément s'en apercevoir. Lorsqu'on laisse tomber une pierre du haut d'une tour, celle-ci tombe au pied, c'est donc que la tour, et donc la Terre sur laquelle la tour est construite est immobile.
Galilée essaie d'expliquer que lorsque l'on est dans un véhicule en mouvement on ne se rend pas compte de celui-ci, si ce mouvement est uniforme. C'est pourquoi on ne se rend pas compte du mouvement de la terre autour du Soleil.
Voici un résumé de son dialogue entre ces deux personnages Simplicio et Salviati :
« Simplicio — [...] Laissons tomber une boule du haut d'un mât d'un navire au repos et notons l'endroit de l'impact. quand le navire est au repos, elle tombe au pied du mât ; quand le navire est en route, elle tombe à une distance égale à celle dont le navire a avancé pendant le temps de la chute de la pierre ; et cela fait un bon nombre de coudées quand la course du navire est rapide. [...] Salviati — [...] Avez-vous jamais fait l'expérience du navire ? [...] Simplicio — Je ne l'ai pas faite mais je crois vraiment que les auteurs qui la présentent en ont soigneusement fait l'observation ;[...] » Salviati — [...] Faites se déplacer le navire à une vitesse aussi grande que vous voudrez ; pourvu que le mouvement soit uniforme et ne fluctue pas de-ci de-là, vous n'observerez aucun changement dans les effets nommés, et aucun d'entre eux ne vous permettra de savoir si le navire avance ou bien s'il est arrêté : si vous sautez, vous franchirez sur le plancher les mêmes distances qu'auparavant et, si le navire se déplace, vous n'en ferez pas pour autant des sauts plus grands vers la poupe que vers la proue, bien que, pendant que vous êtes dans l'air, le plancher qui est en dessous ait glissé dans la direction opposée à celle de votre saut ; si vous jetiez quelque objet à votre ami, il ne faudra pas le lancer avec plus de force pour qu'il lui parvienne, que votre ami se trouve vers la proue et vous vers la poupe ou que ce soit le contraire ; » |
Pour retrouver le texte original, on pourra, par exemple, consulter l'extrait complet au sujet de cette expérience issue du « Discours concernant deux sciences nouvelles ».
Ce qui manquait à l'époque était la notion de référentiel. Dans tout problème de physique, on doit préciser le système étudié et le référentiel choisi pour un observateur donné. En fonction du référentiel choisi, les trajectoires peuvent être différentes et toutes aussi exactes.
Au sujet des expériences de Galilée
- On pourra visionner le court extrait vidéo « Le principe de relativité », sur l'expérience de Galilée sur la chaîne Clipedia.
- Pour poursuivre sur les autres travaux de Galilée et retrouver d'autres dialogues de Simplicio, Salviati et Sagredo, on pourra lire la série d'articles : « Expériences historiques contestées, problématiques détournées, anachronismes piégeants - Le cas des expériences de Galilée », de Pierre Lauginie.
2. Dispositif expérimental pour étudier la chute d'un objet le long d'un mât placé sur un mobile en mouvement rectiligne uniforme
Nous proposons, dans cet article, la construction d'un chariot instrumenté permettant de mesurer le temps de chute d'un objet du haut d'un mât placé sur le chariot. Les mesures sont effectuées lorsque le chariot est à l'arrêt et lorsqu'il est en mouvement rectiligne à vitesse constante.
On retrouvera, sans surprise, le même temps de chute. Le dispositif d'arrêt des mesures étant placé au pied du mât, on retrouve, lorsque le chariot est à l'arrêt comme lorsqu'il est en mouvement uniforme, que l'objet retombe au pied du mât.
2.1 Dispositif expérimental
Le montage proposé est un mât fixé sur un chariot à quatre roues, mu par quatre moteurs pilotés par une carte Arduino. Au sommet du mât un électroaimant lâche un objet en acier.
 Figure 1. a) Dispositif expérimental et b) Schéma du bloc de détection de l'objet Source : Didier Chaffiol. |
Ici, l’objet en acier est un écrou recouvert d'une épaisseur de ruban adhésif (car rapidement l’objet s’aimante un peu et reste collé à l’électroaimant).
L'interface Arduino permet de calculer automatiquement le temps de chute et la distance parcourue par le chariot durant ce temps. Ces données sont affichées sur un écran LCD.
L'expérience est réalisée une première fois à l'arrêt, puis pendant le mouvement uniforme du chariot.
2.2 Déroulement de l'expérience
Première phase :
À l'arrêt, on libère l'objet, le chronomètre interne de l'interface démarre. Lorsque l'objet arrive sur le « pont » le chronomètre est arrêté grâce à un capteur optique (ensemble diode laser et phototransistor).
Deuxième phase :
L'objet tombe pendant le mouvement du chariot. Au moment du lâcher de l'objet, on note le temps du début de la chute et la distance qui sépare le chariot d'un obstacle placé sur sa trajectoire, à l'aide d'un détecteur à ultrason. Ce détecteur mesure à nouveau la distance du chariot à l'obstacle lorsque l'objet arrive sur le « pont ». Ensuite le chariot est arrêté. Le programme renvoit la distance parcourue par le chariot durant la chute de l'objet et le temps de chute, sur l'écran LCD.
2.3 Résultats obtenus
Pour ce dispositif, la hauteur de chute est de 36,5 cm ± 0,5 cm. Sur 33 essais réalisés à l'arrêt, on obtient une durée de chute de 273,9 ms avec un écart type de 3,1 ms. En mouvement, la durée de chute est la même aux incertitudes près.
L’accélération du chariot est très brève et on obtient une vitesse uniforme en moins d’une seconde. Pour s'assurer de réaliser la mesure dans la phase de translation rectiligne uniforme, le lâcher de l’objet est opéré 2 secondes après le départ. Les moteurs sont alimentés avec une tension de 5 V, correspondant à une vitesse de 48 cm/s et permettant un départ pas trop brutal.
De ce fait, le chariot avance de 13 cm durant le temps de la chute. Comme le détecteur est situé au pied du mât et qu'il déclenche la deuxième mesure de distance, cela confirme que l'objet est bien tombé au même endroit, que le chariot soit en mouvement ou à l'arrêt.
3. Réalisation pratique
3.1 Réalisation du chariot
On utilise une planche de sapin de 24 mm pour avoir une bonne inertie afin que le mât, qui sera monté dessus, ne tremble pas pendant le mouvement. On ajoute quatre roues, quatre moteurs, une carte Arduino et un module L298N, figure 2. La carte Arduino ne pouvant pas supporter plus de 500 mA, les moteurs, qui ont besoin de puissance, seront alimentés à travers ce module.
 Figure 2. Photo du chariot piloté Source : Didier Chaffiol. |
Le module L298N a été choisi car il permet de piloter 2 moteurs, à des vitesses différentes et dans les deux sens de marche. Pour notre expérience, un seul module suffit, car les moteurs de gauche sont montés en parallèles, branchés sur une sortie et les moteurs de droite sont montés en parallèles, sur l’autre sortie du module, nous avons simplement besoin de faire marcher le chariot en ligne droite en avant. Il faut prendre la précaution de mettre les moteurs du même côté en parallèle de telle façon qu’ils tournent bien dans le même sens !
3.2 Détection de l’arrivée de l’objet
Un électroaimant, figure 3, est juché sur le mât.
 Figure 3. Électroaimant utilisé et brochage Source : Didier Chaffiol. |
À la verticale de celui-ci, au pied du mât, se trouve le système de détection de fin de chute, figure 4. Un carton collé à une extrémité et placé en biais (figure 4 a et b) vient masquer le faisceau lumineux issu de la diode laser (figure 4 c). L'objet en tombant, abaisse le carton, le changement d'état du phototransistor (figure 4 d) arrête le chronomètre.
 Figure 4. Système de détection de fin de chute Source : Didier Chaffiol. a) Montage de détection, b) Système d'obturation du faisceau laser par un carton, c) Diode laser (emetteur), d) Phototransistor (récepteur) |
3.3 Afficheur et mesure de la distance parcourue par le chariot
Un afficheur LCD (4 lignes) permet d'afficher les différentes instructions du programme, figure 5. Un bouton poussoir, doit être actionné pour passer d'une phase à une autre.
Le module à ultrason mesure la distance parcourue par le chariot, figure 6.
 Figure 5. Instructions sur l'écran LCD Source : Didier Chaffiol. |  Figure 6. Le module à ultrason mesure la distance parcourue par le chariot Source : Didier Chaffiol. |
Option ajoutée au chariot : l'étude d'oscillateurs électriques
Des LEDs rouges et vertes ont été ajoutées en "bonus". Elles clignotent suivant la période de deux montages de multivibrateurs astables. Cela permet d'observer l'influence du produit RC sur la fréquence de clignotement. À l'arrêt les LEDs rouges sont alimentées et en marche ce sont les vertes.

BreadBoard avec les transistors 2N2222 pour réaliser les multivibrateurs (cet ajout n'est pas utile pour la démonstration, mais donne une idée de l'influence du produit RC sur la constante de temps.)
3.4 Liste des éléments utilisés
Les éléments utilisés sont listés ci-dessous avec une idée de leur prix respectif (datant de mars 2022).
Tableau 1. Éléments utilisés pour la réalisation de la maquette
Désignation | Nombre de pièces | Prix approximatif TTC (mars 2022) |
4 moteurs avec contrôleur L298N pour 4 roues | 1 | 10 € |
Carte Arduino Uno R3 DIP With Case | 1 | 13 € |
Afficheur 4 lignes, 20 caractères | 1 | 6 € |
Détecteur ultrason HCSR04 | 1 | 3 € |
Électroaimant Keyestudio | 1 | 9 € |
Batterie lithium 9 000 mAh | 2 | 5 € |
Boitier plastique 18650 pour batterie | 1 | 3 € |
Breadbord | 1 | 9 € |
Cables Dupont Breadboard | 1 | 10 € |
Module diode laser | 2 | 4 € |
Pour une réalisation de la maquette en mars 2022, cela correspondait à un total d'environ 70 €. Il faut ajouter à cela quelques transistors, capacités, et boutons.
4. Programme Arduino
4.1 Attribution des entrées/sorties du microprocesseur
Les PINs du microprocesseur, utilisées dans le programme proposé, sont listées ci-dessous :
| 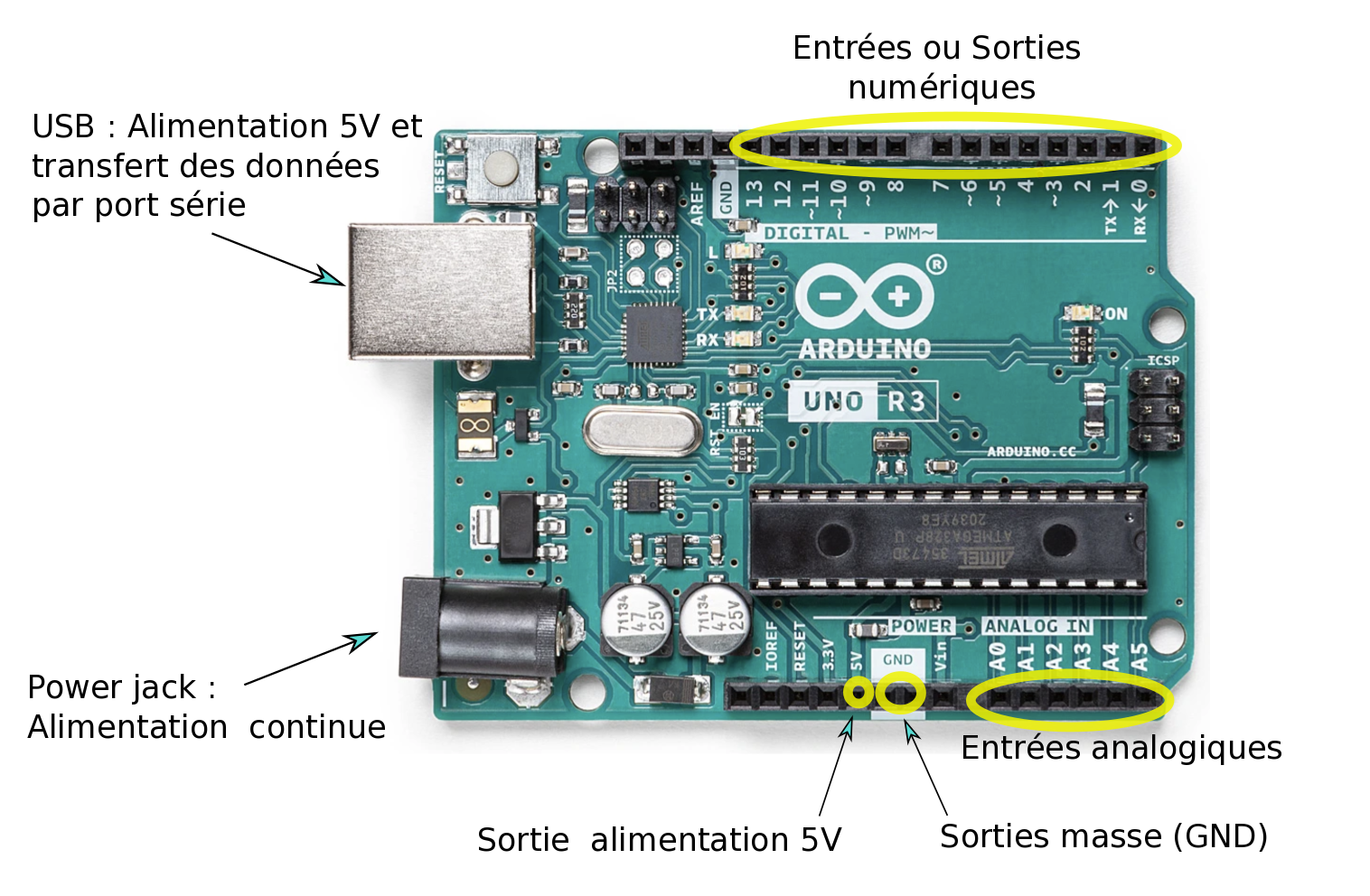 Figure 7. Micro-contrô̂leur Arduino Uno |
4.2 Déroulement du programme
Les différentes phases du programme Arduino « Expe-Gallilee.ino » sont présentées dans cette section. Les mesures seront réalisées à l'arrêt et en mouvement rectiligne uniforme. Un bouton poussoir permet de faire progresser le programme d'une phase à la suivante.
Phase 0 :
- Mise sous tension,
- Feux rouges clignotants ON,
- Affichage de l'écran d'introduction pendant 4 s.

- Laser et électroaimant sous tension (ON),
- On teste de l'état de la photodiode, si elle est éclairée, on affiche un message et on attend qu'elle soit masquée.

- Délai de 3 s,
- Sinon, dès que la photodiode est masquée, on demande d'appuyer sur le bouton poussoir.

- LEDs rouge OFF et LEDs vertes ON,
- Appel de la fonction qui teste l'état du Bouton (Pull Up) : Led Bleu ON (Témoin Bouton). Si état BAS, la Led Bleu s'éteint (permet de savoir que l'on a bien appuyé sur le bouton).
Phase 1 :
- Alimentation de l'électroaimant OFF (l'objet est lâché),
- Enregistrement de l'horaire du lâcher,
- Lorsque l'état de la photodiode passe au niveau Bas, on enregistre l'horaire de fin de chute.
- On affiche le temps de chute de l'objet.

La partie statique de l'expérience est terminée (feux verts OFF et rouge ON). On attend d'appuyer sur le bouton pour passer à la mesure du temps de chute pour le chariot en mouvement.
Phase 2 :
- On alimente l'électroaimant et le laser (ON),
- On vérifie que la photodiode est masquée, sinon on affiche : Masquer Photodiode,
- Puis le programme guide l'expérimentateur pour préparer l'expérience en mouvement.
Il faut une course horizontale de 2,5 m environ. L'expérimentateur doit alors placer un obstacle, comme une boite à chaussures, à une distance comprise entre 2,0 m et 2,2 m.

- On appelle la fonction getSonar, définie dans le programme, pour la mesure de distance du déplacement du chariot,
- À l'aide des mesures ultrasonores, l'afficheur indique s'il faut reculer ou avancer le mobile (ou l'obstacle). Sinon l'écran affiche la suite des instructions pour la mesure en dynamique.

Phase 3 :
- Initialisation des variables pour le calcul de la distance parcourue par le chariot et du temps de chute de l'objet.
Phase 4 :
- Alimentation des moteurs,
- 2,5 s plus tard, l'objet est lâché. On détermine le temps de départ de l'objet en chute libre. On mesure la distance du chariot par rapport à l'obstacle au moment du lâcher.
- On teste l'état de la photodiode et au changement d'état (chute de l'objet), on mesure la nouvelle distance du chariot à l'obstacle,
- Passage à l'état OFF des diodes vertes et ON des diodes rouges,
- Arrêt de l'alimentation des moteurs,
- La distance parcourue par le chariot correspondant au temps de chute de l'objet et le temps sont affichés à l'écran.

4.3 Remarques
Afin de bien mettre en évidence la notion de référentiel, il pourrait être intéressant de filmer le passage du chariot au moment de la chute libre de l'objet. En analysant les images à l'aide du logiciel Tracker, il serait possible de visualiser la trajectoire de la chute de l'objet dans ce référentiel, ainsi que la direction de son vecteur vitesse au cours de la chute.
J'avais réalisé, en classe de terminale C (!), une expérience similaire, qui consistait à faire tomber une bille dans un chariot en mouvement. L'article est paru dans le Bulletin de l'Union des physiciens n°611 de 1979. Je tirais le chariot avec un petit treuil improvisé, et le déclenchement de la chute était initié par un faisceau lumineux, celui-ci éclairait une photorésistance qui faisait changer d'état le transistor qui alimentait l'électroaimant placé en tête du mât.
Pour citer cet article :
Création d'un chariot piloté par un microcontrôleur Arduino, pour illustrer la relativité du mouvement selon Galilée, Chaffiol, juin 2024. CultureSciences Physique - ISSN 2554-876X, https://culturesciencesphysique.ens-lyon.fr/ressource/Galilee-chute-corps.xml