
Activer le mode zen
Ressource au format PDF
Mots-clés
Classification
Résolution numérique en langage python : Comment faire rebondir une balle avec de l'énergie cachée
23/03/2020
Résumé
Nous présentons ici la modélisation de la chute libre et le rebond de balles à l'aide d'un code écrit en langage python.
Table des matières
1. Introduction - présentation de l'expérience
Dans le premier article « Résolution numérique en langage python : la chute libre - 1 », nous nous sommes intéressés à la chute libre d'une balle de tennis, sans vitesse initiale et sans prendre en compte les frottements de l'air, jusqu'au moment où elle touche le sol.
Dans ce deuxième article, nous allons mettre en évidence le tranfert d'énergie lors du rebond entre deux balles posées initialement l'une sur l'autre et lâchées sans vitesse. La vidéo ci-dessous présente l'expérience que nous modéliserons ensuite à l'aide d'un programme en langage Python.
Source - © 2020 CultureSciences-Physique |
2. Modélisation et codage en Python
Nous proposon de présenter le programme python, la physique en jeu et son codage de manière linéaire le long de l'article.
Dans un premier temps, on importe les bibliothèques python nécessaires au traitement des données et à l'affichage des graphiques, figure 1.

Nous lâchons une balle de tennis posée sur un ballon de basket d'une hauteur donnée. Une fois que les deux balles ont quitté la main, la seule force qui s'applique sur elles est la force de gravité, figure 2. On pourra considérer que la force de réaction qu'éxerce le ballon de basket sur la balle de tennis disparait quasiment immédiatement après le lâché. Dans notre étude, les frottements de l'air ne sont pas pris en compte tout comme la dissipation d'énergie interne des balles. Nous ne cherchons pas ici à retrouver les valeurs exactes de la vidéo mais proposons une étude simplifiée pour s'intéresser à la physique mise en jeu.

On renseigne dans le code les paramètres relatifs aux deux balles : masse, rayon, constante de raideur, figure 3.
Dans la modélisation proposée ici, le rebond des balles est représenté à l'aide d'un modèle masse-ressort linéaire. Les constantes de raideurs sont fixées pour tout le mouvement et correspondent à une petite déformation (cas d'un lâché sans vitesse initiale).
 Figure 3. Définition des deux objets |
Pour les données relatives à la balle de tennis, on pourra consulter le site : Tennis Warehouse University, ou encore Dynamic properties of tennis balls.
Et le livre « The Physics of Basketball » de John J. Fontanella, 2006, pour le ballon de basket.
On renseigne ensuite les valeurs de constante (gravitation), paramètre (pas de temps) et les conditions initiales (hauteur du lâché, vitesse initiale), figure 4.
On définit pour les positions et vitesses des deux balles des vecteurs (np.array) qui vont contenir les valeurs au cours du mouvement.
 Figure 4. Initialisation des grandeurs |
Maintenant, nous appliquons la méthode d'Euler pour coder le mouvement, figure 5.
De la même manière que nous l'avons fait dans le premier article, nous calculons à chaque instant la position et la vitesse des balles à l'aide d'une méthode numérique de résolution de l'équation différentielle basée sur le schéma d'Euler.

On fixe, arbitrairement, le temps de calcul à 1,7 s.
On définit le nombre de points "nb_points" du calcul. Il est choisi à l'aide du temps total ("temps_total") avec un échantillonnage au pas de temps "dt" défini précédemment. Le nombre de points est nécessairement un entier, on utilise la fonction int pour ne garder que la partie entière.
On définit alors le vecteur "temps" de la manière suivante :
Définition d'un vecteur (linspace) partant du temps au début (0), au temps final "nb_points", contenant "nb_points+1" éléments (0 et les nb_points autres valeurs), multiplié par le pas de temps (dt).
Dans cet exemple on a fixé le temps au cours duquel on va modéliser la trajectoire des balles, on choisit alors d'utiliser une boucle for de la manière suivante :
Pour un indice d'itération "i" partant de 0, la boucle se répétant "nb_points", avec une incrémentation de 1, on calcule les vitesses et positions des deux balles.
Boucle for et condition if
Attention !
- Lorsqu'on introduit la boucle for ou la condition if, ne pas oublier le signe ":"
- Les instructions répétées dans la boucle doivent être indentées (tabulation).
Nous avons déjà rencontré la même manière de définir la boucle while dans l'article précédent.
Pour chaque pas de temps, on calcule les forces s'exerçant sur la balle de tennis et le ballon de basket. Lorsqu'ils sont en chute libre, seul le poids intervient, figure 6. Par contre, lors du rebond, on prend en compte les constantes de raideurs : on note sur le schéma les forces de rappel FK_B et fk_t respectivement pour le ballon de basket et la balle de tennis, figure 7.
 Figure 7. Représentation des forces lors du rebond |

À chaque pas de temps, on calcule les forces s'exerçant sur chaque balle à l'aide d'un test sur leur position par rapport au sol et entre elles.
Ce qui donne, en prenant l'exemple du ballon de basket, lorsqu'on projette les forces sur l'axe vertical et que l'on appelle FYB la résultante :
 |
 |
Ensuite, comme nous l'avons fait dans le premier article sur la chute libre, nous calculons à chaque instant la vitesse et la position des balles à l'aide d'une méthode numérique de résolution de l'équation différentielle basée sur le schéma d'Euler.
 |
On rappelle que l'approximation de la dérivée par une fonction ∆ n'est raisonnable que si la variation de la vitesse entre les deux instants est toute petite.
 |
D'où le calcul de la vitesse pour chaque pas de temps :
 |
De la même manière, la position est calculée à chaque pas de temps.
Reprenons alors sereinement le programme python, figure 5. À chaque itération de la boucle, nous venons concaténer les valeurs des vitesses et des positions des deux balles, de la manière suivante :
Le vecteur (array) "vit_yB" comprend toutes les valeurs des vitesses calculées à chaque itération pour le ballon de basket. La fonction np.append permet de concaténer (rajouter un élément au vecteur) la valeur calculée "vY_B" à la suite des éléments précédents contenus dans "vit_yB".
Dans l'article précédent, nous avons introduit l'usage des listes. Il est ici plus intéressant de travailler avec des vecteurs (array). Nous proposons, en fin d'article, une discussion à ce sujet.
Lorsque l'on sort de la boucle, figure 5, (les dernières instructions ne sont pas indentées sur la boucle for), on demande d'afficher le nombre de points calculés "nb_points". L'usage de la fonction len (pour length = longueur) est très utile pour connaitre la taille (le nombre d'éléments) contenus dans un vecteur.
Le code renvoie les éléments suivants, figure 8.
 Figure 8. Sortie du code de la figure 5 |
Il est important de noter que si la chute libre d'un corps admet une solution analytique simple et connue de tous, dans le cas d'une chute avec rebond, la solution analytique est plus compliquée et n'est pas du programme de lycée. Dans cette modélisation, nous donnons simplement les instructions pour effectuer un calcul à chaque pas de temps en prenant en compte la physique : quelles forces agissent sur les balles pour calculer leurs vitesses et leurs positions.
Nous avons fourni les lois de la physique au calculateur pour qu'il soit capable de nous renvoyer position et vitesse des balles à chaque instant.
3. Trajectoires et vitesses
On peut ensuite tracer la représentation graphique des trajectoires des deux balles en fonction du temps, figure 9.

Le programme affiche le graphique, figure 10.
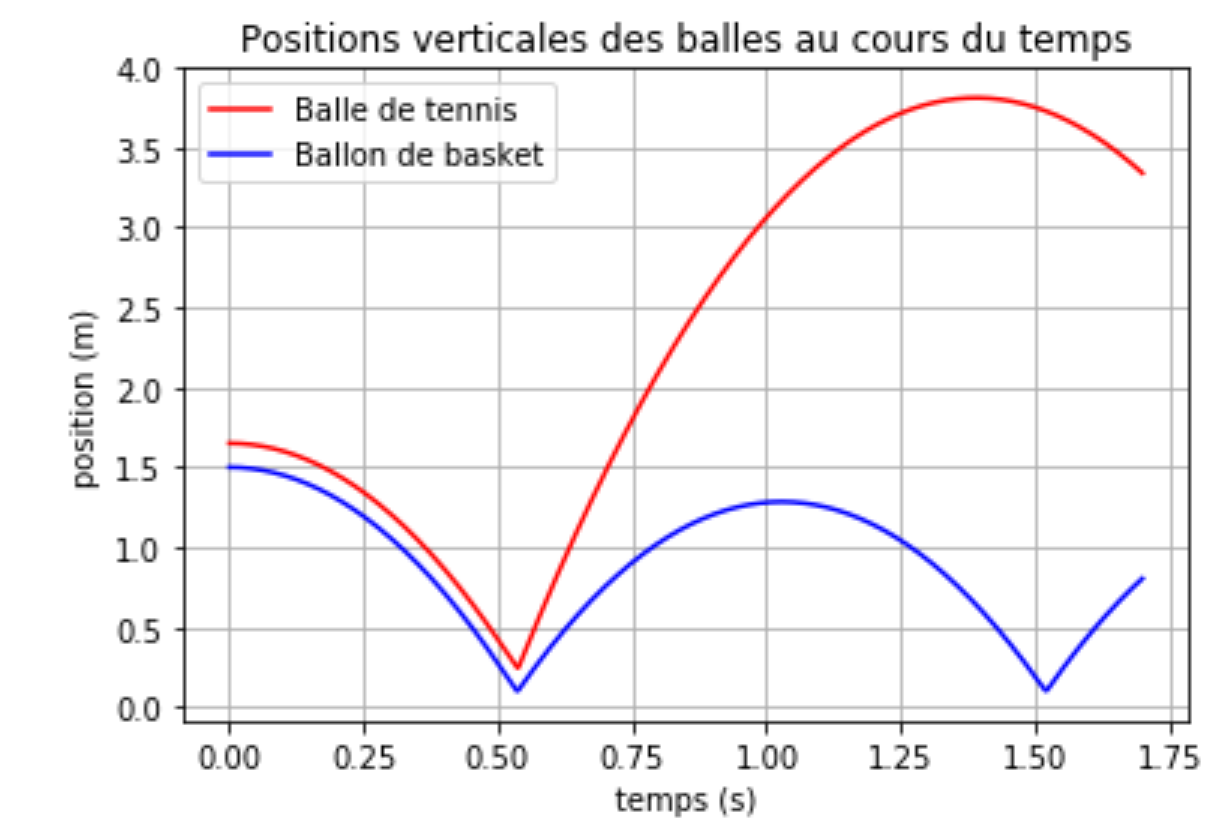
On retrouve, comme dans l'expérience, le tranfert d'énergie d'une balle à l'autre mis en évidence par le rebond beaucoup plus haut de la balle de tennis.
On trace aussi la représentation graphique des vitesses en fonction du temps, figure 11.

Le programme affiche le graphique, figure 12.
 |
Intéressons-nous maintenant uniquement à la balle de tennis et superposons la représentation graphique de sa vitesse et de sa position au cours du temps, figure 13.
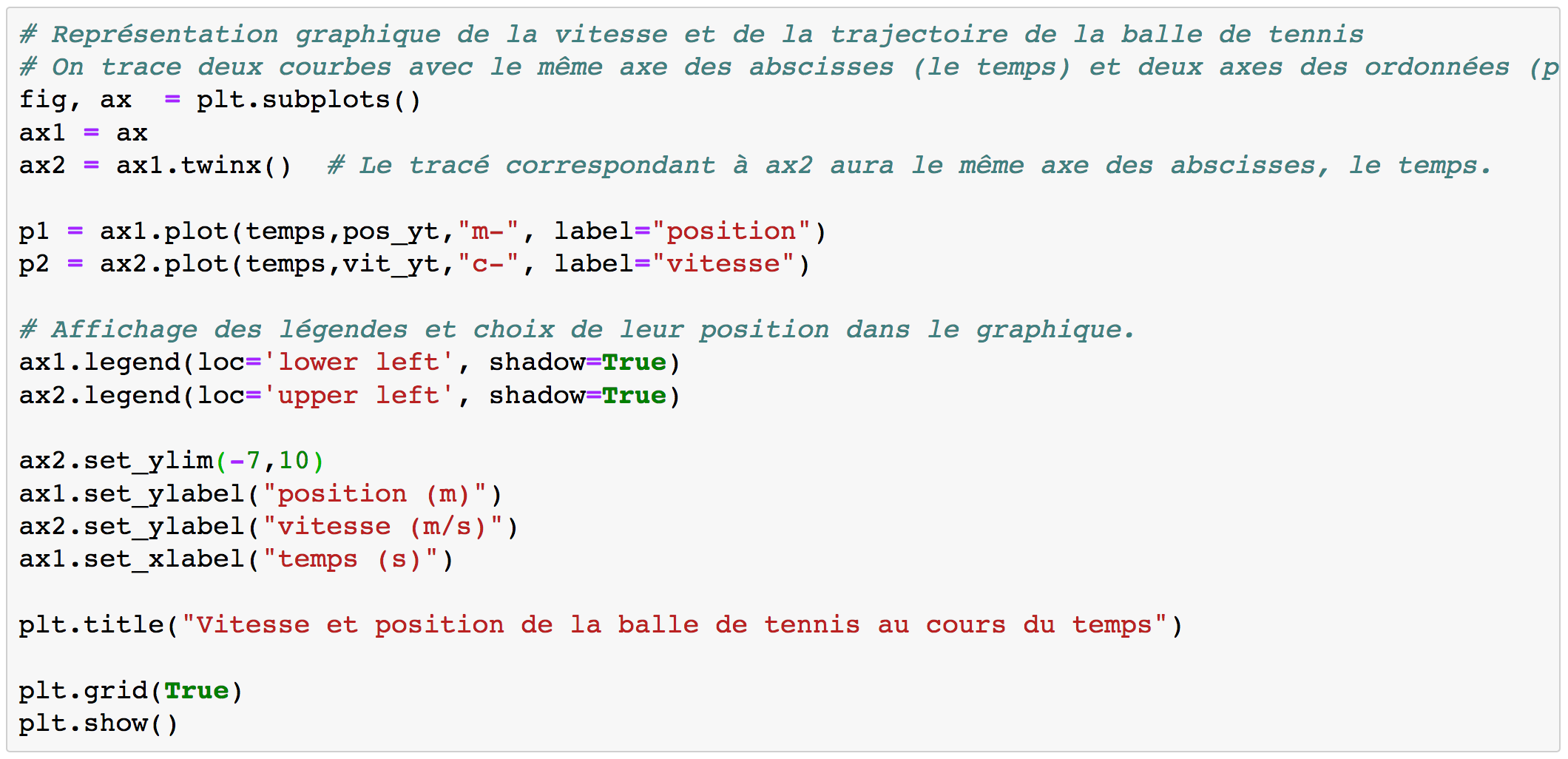
Le code est un peu différent car on va tracer deux courbes qui ont le même axe des abscisses (le temps) et deux axes des ordonnées différents (la vitesse en m/s et la position en m). À l'aide de la fonction twinx() on définit que l'axe des abscisses est le même pour les deux tracés.
Le programme affiche le graphique, figure 14. Il est ensuite annoté ici par nos soins pour la discussion.
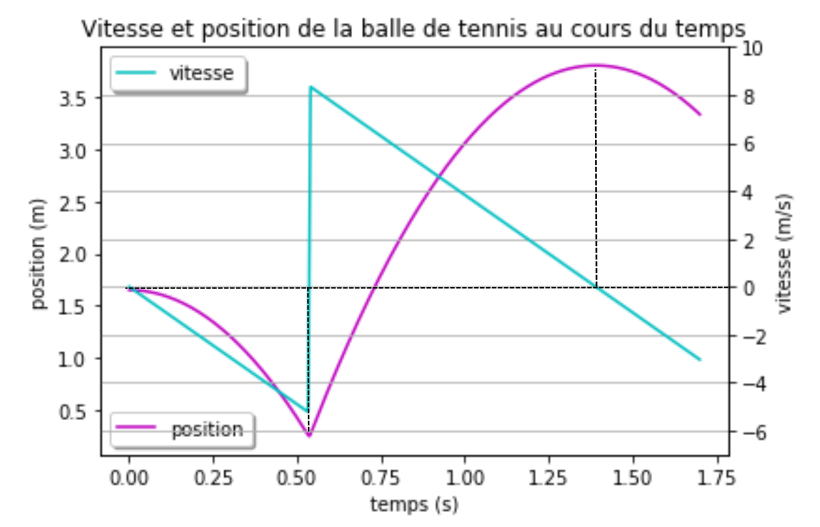 |
On retrouve que lorsque la vitesse est nulle, la position de la balle de tennis est à un extremum de sa trajectoire, soit au point le plus bas : l'arrêt juste avant le rebond, soit au point le plus haut : l'arrêt juste avant la redescente.
Ensuite, on peut aussi retrouver l'accélération de pesanteur, par exemple, sur la première partie, encadrée en bleu, lorsque les balles sont en chute libre. On détermine tout d'abord l'indice du vecteur correspondant à la dernière position avant le rebond, figure 15.

La fonction np.argmin() renvoie l'indice du vecteur correpondant à la valeur minimale de ce vecteur. En effet, la 10622ème valeur du vecteur vitesse est de -5,2 ce qui correspond à la valeur minimale. De la même manière il existe la fonction np.argmax() qui renvoie, cette fois à l'indice du vecteur correpondant à sa valeur maximale.
Ensuite nous réalisons une régression linéaire des point calculés dans le vecteur vitesse, fonction que nous avons déjà rencontrée dans un article précédent « Analyse numérique appliquée à une source de tension, en langage Python ».
On calcule la régression sur les points correspondant à la première partie en chute libre de la balle de tennis, encadré en bleu sur la figure. Le calcul est donc réalisé pour les valeurs du vecteur vitesse dont l'indice est compris entre 0 et 10622.
Finalement,on retrouve bien une variation de vitesse, donc une accélération, égale à l'accélération de la gravité. On rappelle qu'ici nous ne prenons pas en compte les frottements.
On aurait pu tout aussi bien faire les calculs sur la deuxième partie du mouvement en chute libre.
On peut aussi comparer les variations de vitesses des deux balles, sur la figure 12. La pente est la même pour le ballon de basket et pour la balle de tennis ce qui permet de retrouver qu'en chute libre sans frottement, les corps tombent à la même vitesse, indépendamment de leur masse.
4. Énergie
Intéressons-nous maintenant à l'énergie des balles.
Nous calculons les énergies cinétiques et potentielles des deux balles, figure 16.

Nous traçons l'énergie cinétique et potentielle de la balle de tennis, figure 17.

Le programme affiche le graphique, figure 18.

Si l'on s'intéresse à l'énergie cinétique, on retrouve qu'elle est, en effet, nulle au début de la trajectoire puis s'annule lorsque la balle touche le sol ou lorqu'elle est au sommet du rebond.
L'énergie potentielle suit bien la représentation de la position de la balle, au facteur masse fois gravité près.
On s'intéresse maintenant à l'énergie totale, c'est-à-dire à la somme de l'énergie cinétique et potentielle de la balle de tennis, figure 19.
 |
Le programme affiche le graphique, figure 20.
 |
On observe bien le transfert d'énergie qui a lieu au moment du rebond entre le ballon de basket et la balle de tennis. Si le système avait été isolé, l'énergie totale serait restée constante.
Traçons maintenant l'évolution de l'énergie du ballon de basket, figure 21.
 |
Le programme affiche le graphique, figure 22.
 |
Maintenant on va s'intéresser à l'énergie totale du système composé de la balle de tennis et du ballon de basket, figure 23.

Le programme affiche le graphique, figure 24.
 |
De manière rassurante, on constate que l'énergie totale du système est la même avant et après les rebonds. Nous n'avons, en effet, pas introduit de terme de dissipation dans la modélisation.
Par contre au moment des rebonds on observe deux pics, que l'on peut mettre en évidence en effectuant un zoom dans la représentation graphique, figure 25.

Le programme affiche le zoom sur le graphique au moment du premier rebond, figure 26.
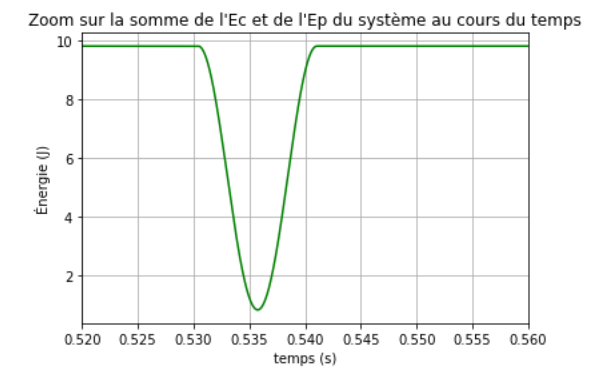
On observe que pendant le rebond l'énergie n'est pas constante. Il s'agit tout simplement de l'énergie élastique des balles qui n'a pas été prise en compte dans le calcul de l'énergie totale : somme de l'énergie cinétique et de l'énergie potentielle.
Pour observer la conservation d'énergie mécanique du système, il faut simplement rajouter l'énergie élastique des balles aux moments des rebonds.
5. Note sur l'utilisation de list ou array
Pour modéliser les vecteurs ou les matrices, il est beaucoup plus simple d'utiliser le module numpy qui fournit le type array, plutôt que d'utiliser list. C'est une véritable atout pour les calculs numériques. Les opérations sur les tableaux (vecteurs ou matrices) sont optimisées avec numpy et sont beaucoup plus rapides qu'elles ne le seraient sur des listes équivalentes.
Par exemple, pour réaliser le calcul de l'énergie cinétique du ballon de basket avec les vitesses définies sous la forme de liste, il faut indiquer que chaque terme, appelé ici "v", de la liste [vitesse_yB] doit être mis au carré et multiplié par 0,5 et par la masse, figure 27.

6. Programmes Python
Programmes python :
Télécharger le programme python Chute-libre-2-rebond-energie.py
Télécharger le programme python au format Jupyter Notebook Chute-libre-2-rebond-energie.ipynb
Pour citer cet article :
Résolution numérique en langage python : la chute libre avec rebond, Delphine Chareyron, mars 2020. CultureSciences Physique - ISSN 2554-876X, https://culturesciencesphysique.ens-lyon.fr/ressource/chute-libre-python-2.xml