
Activer le mode zen
Ressource au format PDF
Mots-clés
Classification
Résolution numérique en langage python : la chute libre - 1
Chute libre sans rebond - introduction aux listes
07/01/2020
Résumé
Nous présentons ici la modélisation de la chute libre d'une balle à l'aide d'un code écrit en langage python.
Table des matières
1. Introduction
Dans le premier article de cette série sur la chute libre, on va s'intéresser à la chute libre d'une balle de tennis, sans vitesse initiale et sans prendre en compte les frottements de l'air, jusqu'au moment où elle touche le sol.
Dans un premier temps, nous allons voir comment modéliser la trajectoire et l'évolution de la vitesse de la balle à l'aide de la méthode d'Euler. Nous verrons, ensuite, l'importance du choix du pas de temps et nous nous servirons des listes pour créer les vecteurs vitesses et positions.
2. Modélisation de la chute libre
2.1 Bilan des forces
Nous lâchons une balle d'une hauteur donnée. Une fois que la balle a quitté la main, la seule force qui s'applique sur elle est la force de gravité (nous négligeons les frottements).
On peut alors écrire le principe fondamental de la dynamique :
 |
En projettant sur l'axe vertical, on obtient :
 |
La masse de l'objet n'intervient pas dans la vitesse de chute.
2.2 Méthode d'Euler
Nous allons maintenant calculer à chaque instant la position et la vitesse de la balle à l'aide d'une méthode numérique de résolution de l'équation différentielle basée sur le schéma d'Euler, décrit ci-dessous.
À partir de la connaissance d'une valeur de la vitesse à un instant (vn à l'instant tn), on calcule la valeur suivante (vn+1 à l'instant tn+1) à l'aide de l'approximation de la dérivée :

Cela se traduit géométriquement par le calcul du coefficient directeur de la tangente à la courbe.
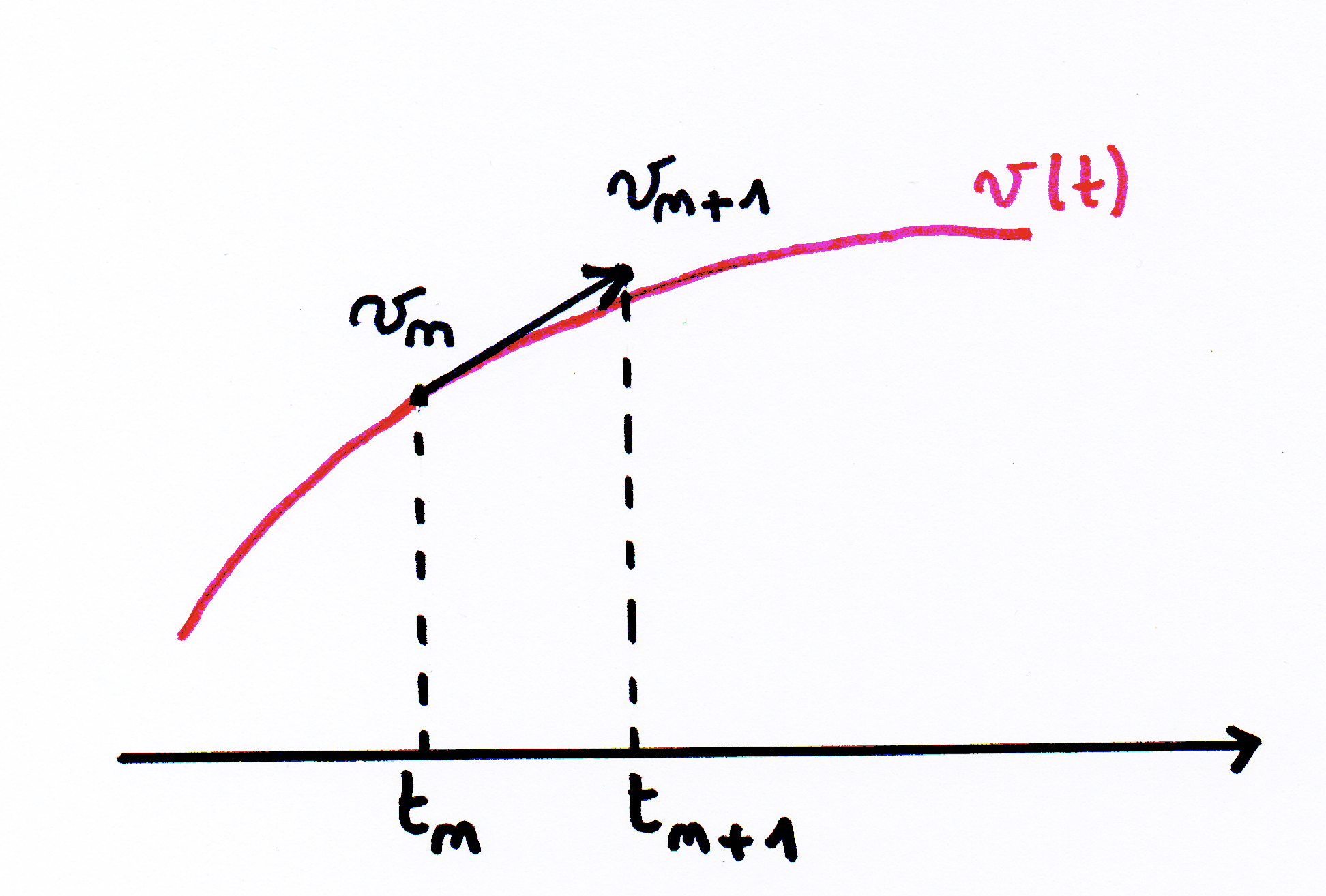 Principe de la méthode d'Euler. Le cas présenté correspond à la méthode d'Euler explicite : le calcul se fait par approximation sur la tangente au point initial (vn). |
Un choix simple est de prendre un intervalle de temps régulier, c'est à dire de fixer la valeur de tn+1 - tn. Mais on pourrait tout-à-fait choisir un pas de temps variable en fonction de l'optimisation et de la précision du calcul pour des moments choisis.
Nous présentons ici la méthode d'Euler, il existe de nombreux autres algorithmes d'intégration plus ou moins compliqués à mettre en œuvre : Runge Kutta...
On remplace donc la dérivée par la valeur de la pente. Une telle approximation n'est raisonnable que si la variation entre les deux instants est toute petite.
Ainsi on peut écrire :
 |
D'où :
 |
On peut maintenant décomposer la variation ∆ entre les deux vitesses correspondant à l'intervalle de temps ∆t :
 |
On a alors :
 |
Ce qui peut s'écrire :
 |
Finalement, il suffit de répéter l'itération afin de connaitre à chaque instant la valeur de la vitesse le long de la chute :
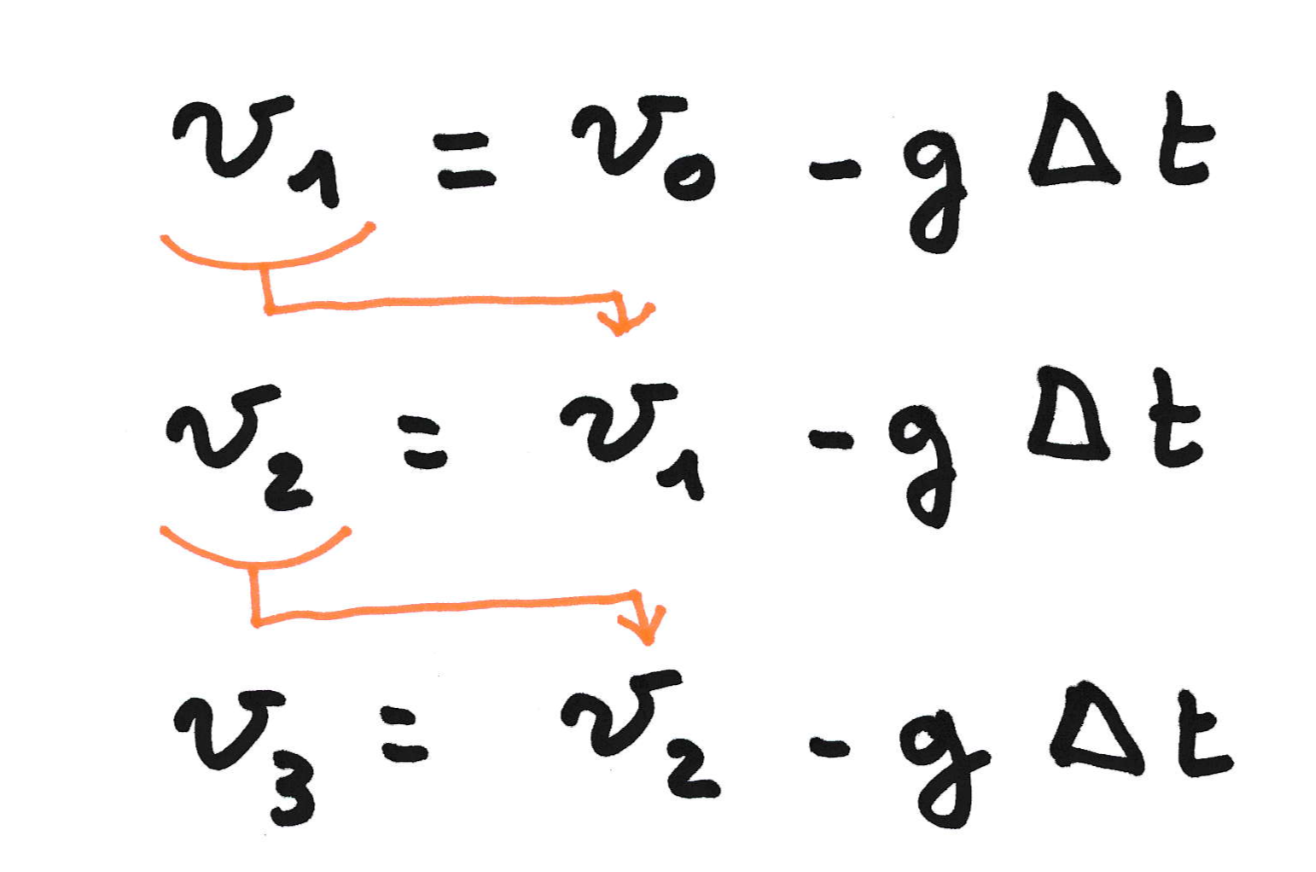 |
3. Codage en python de la résolution numérique
3.1 Description du code
Dans un premier temps, on importe les bibliothèques python nécessaires au traitement des données et à l'affichage des graphiques, figure 1.

On renseigne les valeurs de constante (gravitation), paramètre (pas de temps) et données (rayon de la balle de tennis, hauteur du lâché, vitesse initiale), figure 2.
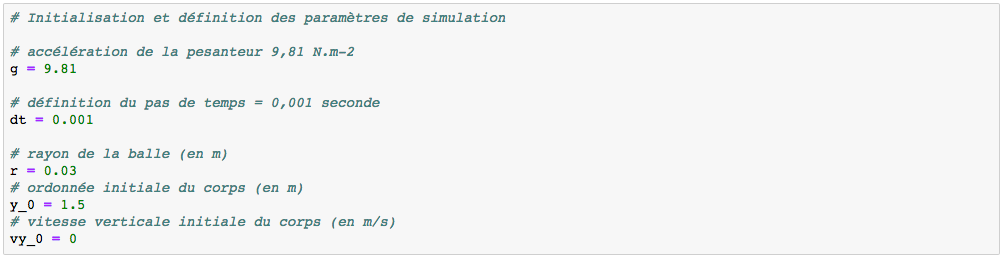 Figure 2. Initialisation des grandeurs |
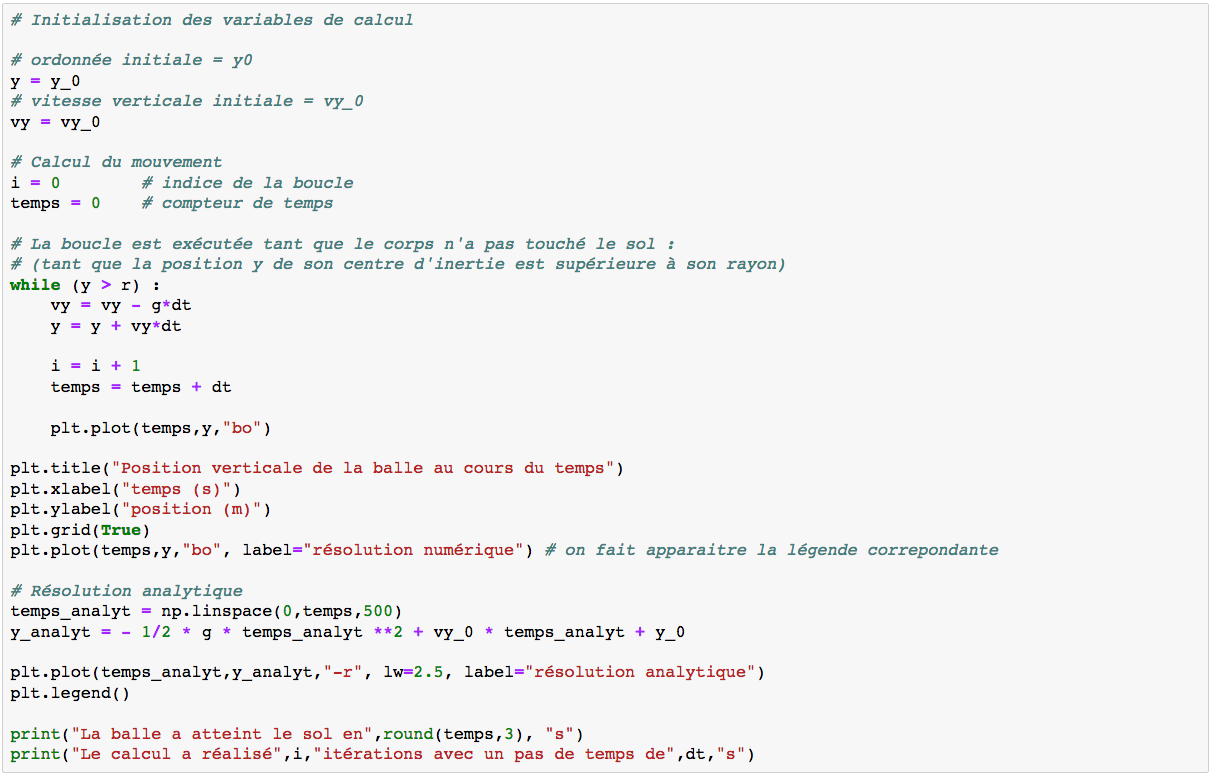
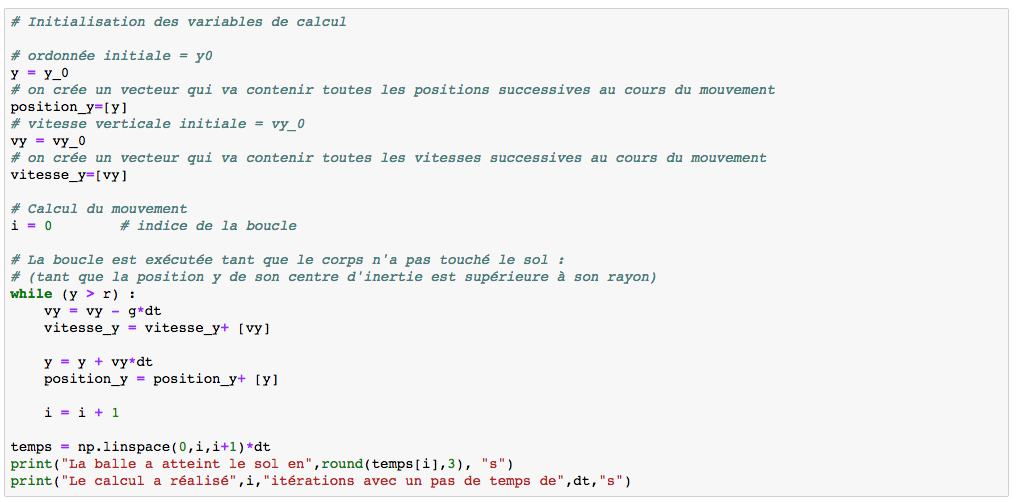
Maintenant, nous appliquons la méthode d'Euler pour coder le mouvement, figure 3.
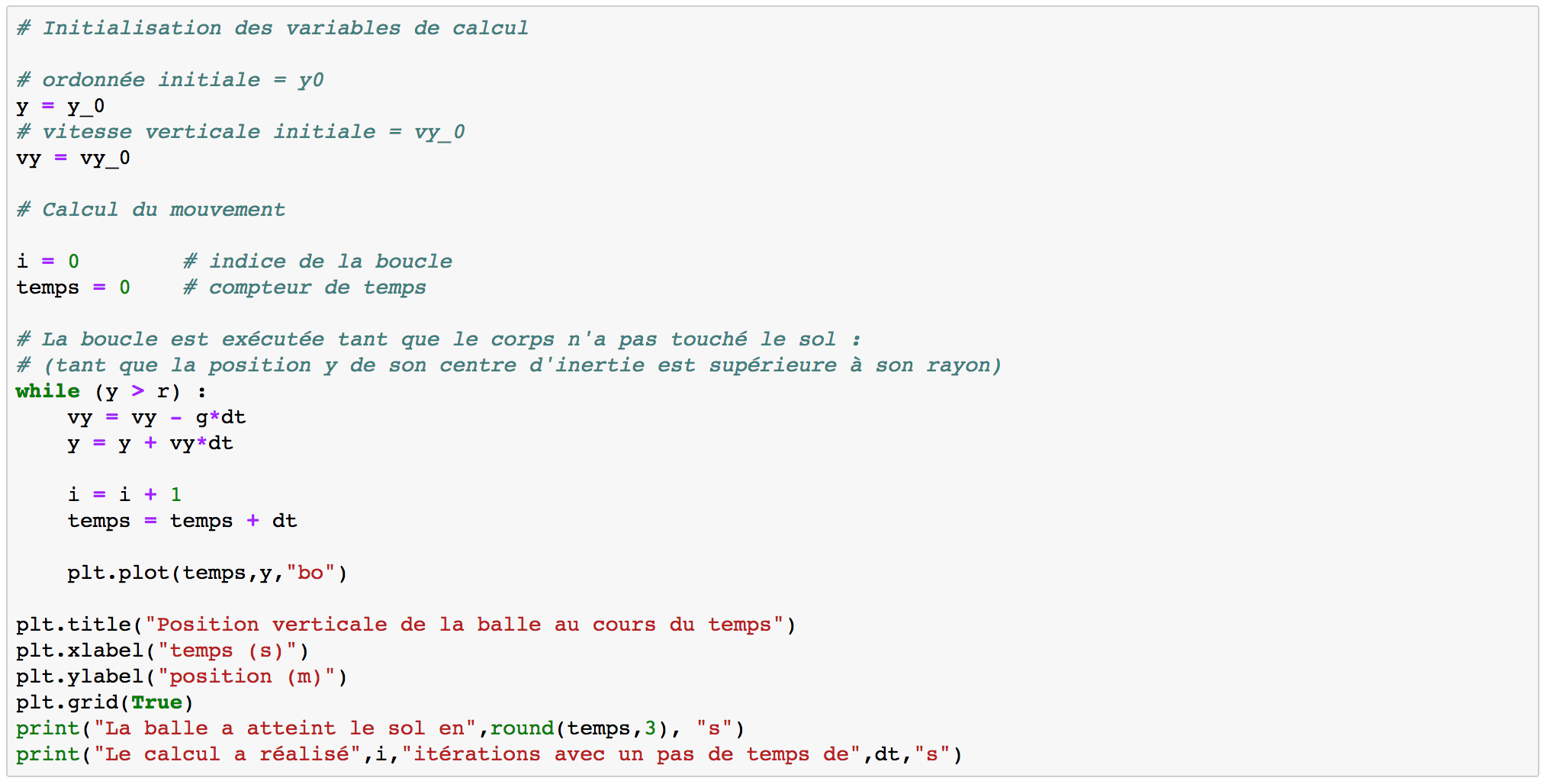
Dans un premier temps, on initialise la position initiale de la balle à la valeur donnée précédemment (y = y_0) et sa vitesse initiale (vy = vy_0).
Nous introduisons la variable "i" pour compter le nombre d'itérations du calcul le long de la trajectoire. La variable "temps" va nous permettre de mesurer le temps de chute.
Dans cet exemple on s'intéresse à la trajectoire de la balle jusqu'à ce qu'elle touche le sol, on choisit alors d'utiliser une boucle while de la manière suivante :
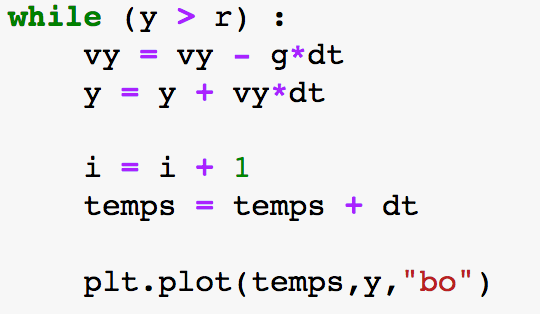
Tant que le centre d'inertie de la balle est plus haut que son rayon (y > r) (la balle n'a pas touché le sol), on calcule, pour chaque itération, sa vitesse et sa position, on incrémente le compteur i de 1 et le compteur temps d'un pas de temps. On trace un nouveau point y de la trajectoire.
Boucle while
Attention !
- Lorsqu'on introduit la boucle while, ne pas oublier le signe ":" après la condition.
- Les instructions répétées dans la boucle doivent être indentées (tabulation).
Dans cet exemple, seules les instructions suivantes sont répétées à chaque itération.
Lorsque l'on sort de la boucle, figure 3, (les dernières instructions ne sont pas indentées sur la boucle while), on ajoute à la représentation graphique : un titre, les grandeurs et unités des axes, et un quadrillage.
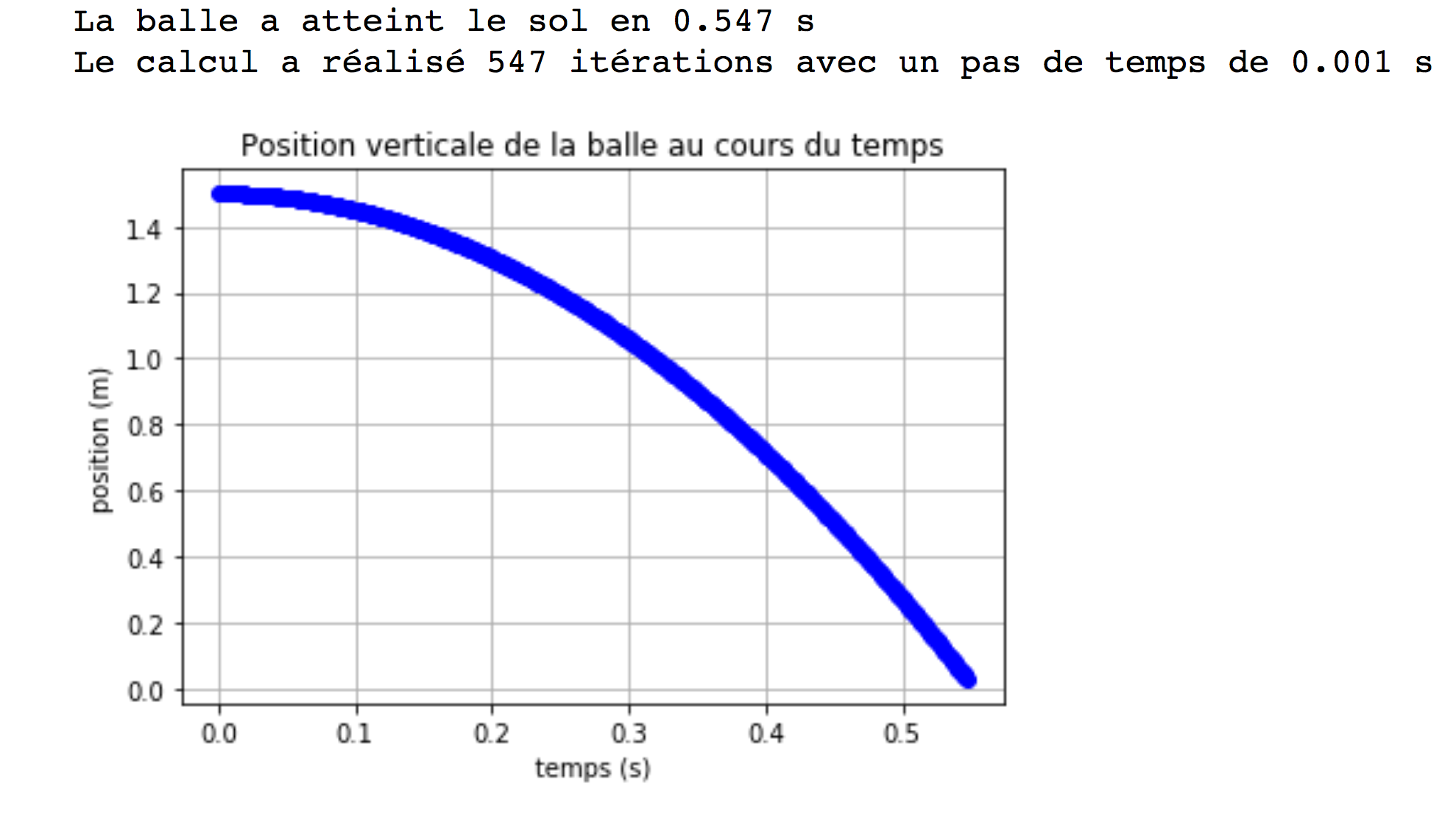
À l'aide de la fonction print, on affiche le temps de chute de la balle. La fonction round(x,3) renvoie la valeur de x arrondie à 3 décimales. On affiche de nombre d'itérations du calcul et le pas de temps.
Le code renvoie le graphique et les éléments suivants, figure 4.
3.2 Importance du pas de temps
L'hypothèse de départ de cette modélisation est de confondre une dérivée avec un ∆. Cela signifie que, pour être au plus juste, il est nécessaire de choisir un pas de temps très petit, de telle façon qu'entre deux pas, il n'y ait qu'une toute petite variation des grandeurs.
Pour tester notre méthode de résolution numérique, on propose de tracer sur le même graphe, le résultat analytique du problème : y(t) = 1/2gt2 + vy0t + y0
Nous avons besoin de créer deux vecteurs : "temps_analyt" correspondant aux abcsisses et "y_analyt" correspondant aux ordonnées. La création du vecteur est réalisée à l'aide de la fonction linspace, de la manière suivante :
Définition d'un vecteur (linspace) partant de la valeur de temps minimum (0), à la valeur maximum (temps), contenant 500 points (500).
Le vecteur correspondant à la trajectoire "y_analyt" est donné par l'équation de la trajectoire.
On trace le résultat analytique avec une ligne rouge (-r) assez épaisse (lw=2.5). On ajoute une légende (label) pour chaque courbe, l'affichage est géré par la fonction plt.legend(), figure 5.
Le programme affiche le graphique, figure 6.
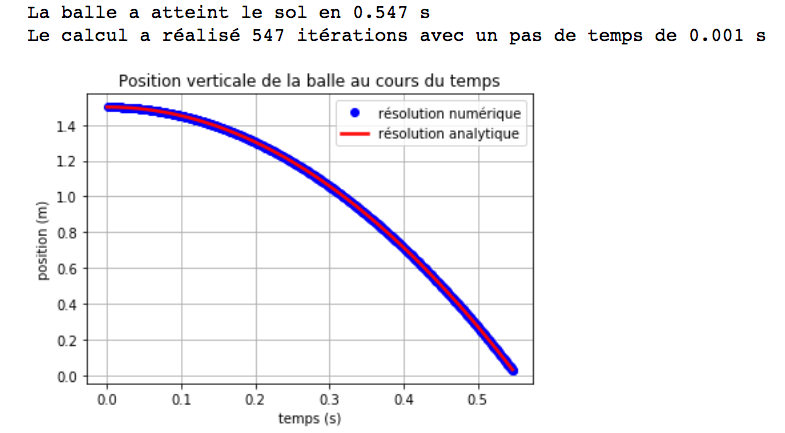
Le calcul de la trajectoire par la méthode numérique suit complètement le résultat analytique.
Maintenant, observons les effets du choix du pas de temps sur la méthode de résolution, tableau 1.
Nous augmentons successivement la valeur du pas de temps à 10 ms; 50 ms; 100 ms et 200 ms.
Tableau 1. Mise en évidence de la précision du calcul lors de la résolution numérique
 Pas de temps dt = 0,01 s | 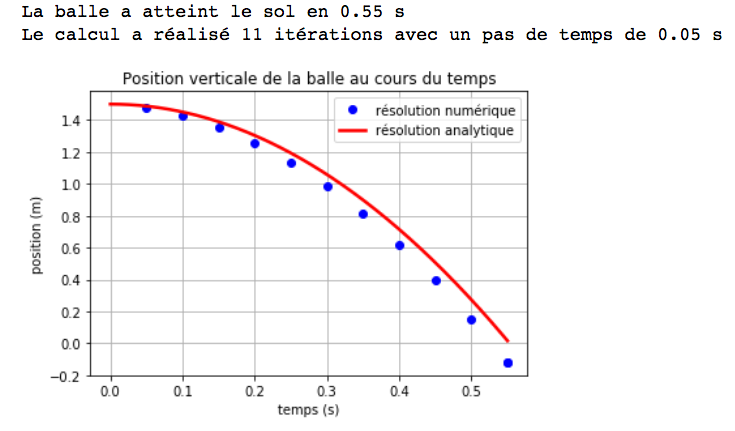 Pas de temps dt = 0,05 s |
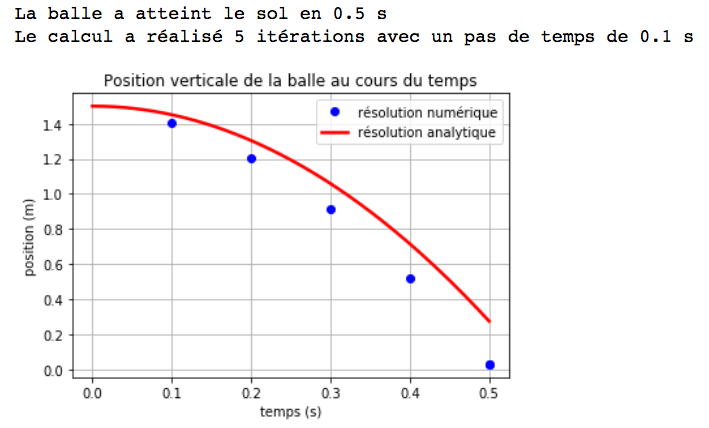 Pas de temps dt = 0,1 s | 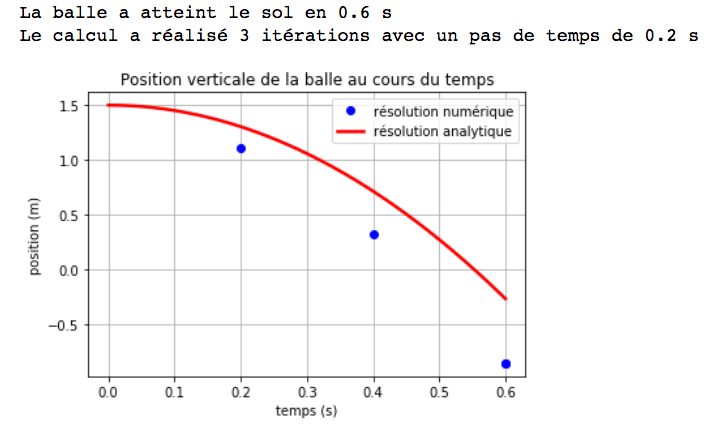 Pas de temps dt = 0,2 s |
On constate que le modèle s'écarte de plus en plus de la trajectoire réelle. Dans certains cas, le programme renvoie une position y négative de la balle. Les pas de temps sont effectivement trop grands et ne respectent plus la condition initiale de toutes petites variations.
Nous avons pu vérifier qu'il est donc nécessaire de choisir un pas de temps très petit, de façon à pouvoir remplacer une dérivée avec un ∆.
4. Utilisation des listes pour l'affichage des résultats
Dans cette partie nous proposons simplement de consigner les valeurs des vitesses et posistion dans un tableau pour chaque pas de temps. Cette opération est réalisée par la création de listes dont on augmente la taille au cours du temps. On trace, ensuite les représentations graphiques de la vitesse et de la position en fonction du temps.
Listes
Une liste est formée d'une succession d'éléments qui peuvent être des nombres, des lettres... Les éléments sont séparés par une virgule et le tout est placé entre crochets. [liste]
Le programme précédent est alors légèrement modifié, figure 7.
 |
On définit une liste (un vecteur) "position_y" qui va regrouper les diférentes valeurs de y, dont la première y_0. De la même manière on définit la liste "vitesse_y".
Dans la boucle, pour chaque itération, on vient concaténer les valeurs à la manière du petit exemple suivant :
Si a=[1,2,3], le vecteur c est égal au vecteur a auquel on rajoute l'élément 4.
 |
Comme on utilise les listes, nous ne sommes plus obligés d'incrémenter le compteur "temps" à chaque pas de temps. Pour optimiser le calcul, il suffit d'utiliser la variable i qui nous renseigne, en sortie de boucle, sur le nombre d'itérations exécutées.
On définit alors le vecteur "temps"de la manière suivante :
Définition d'un vecteur (linspace) partant du temps au début (0), au temps final où la balle touche le sol (i), contenant i+1 points (0 et les i autres valeurs), multiplié par le pas de temps (dt).
On peut ensuite tracer la représentation graphique de la vitesse en fonction du temps, figures 8 et 9.
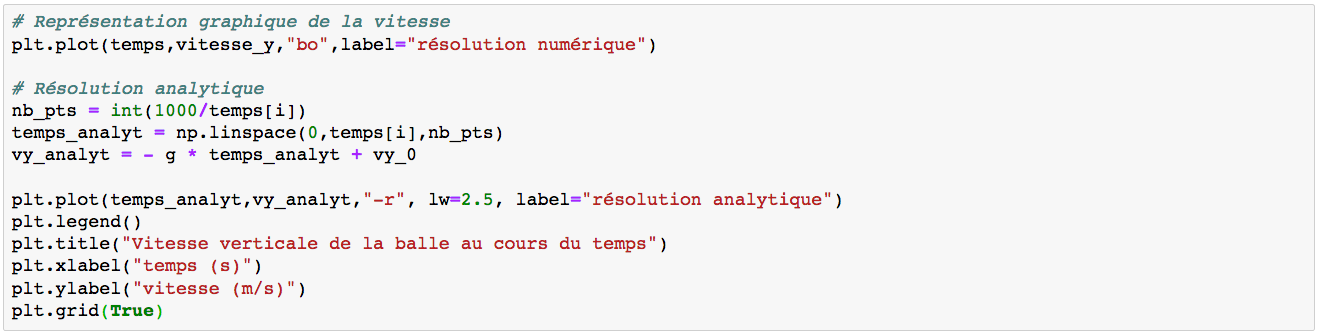
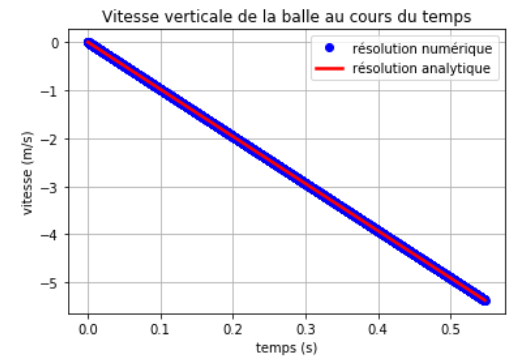
Pour la résolution analytique on définit le vecteur "temps_analyt".
Une fois que le vecteur "temps" est défini, en sortie du calcul, temps[i] correspondra à la dernière valeur (ième valeur du vecteur "temps"). Le nombre de points "nb_pts" du vecteur "temps_analyt" est choisi à l'aide du temps total (temps[i]) avec un échantillonnage de 1000 points (1000/temps[i]). Le nombre de points est nécessairement un entier, on utilise la fonction int pour ne garder que la partie entière.
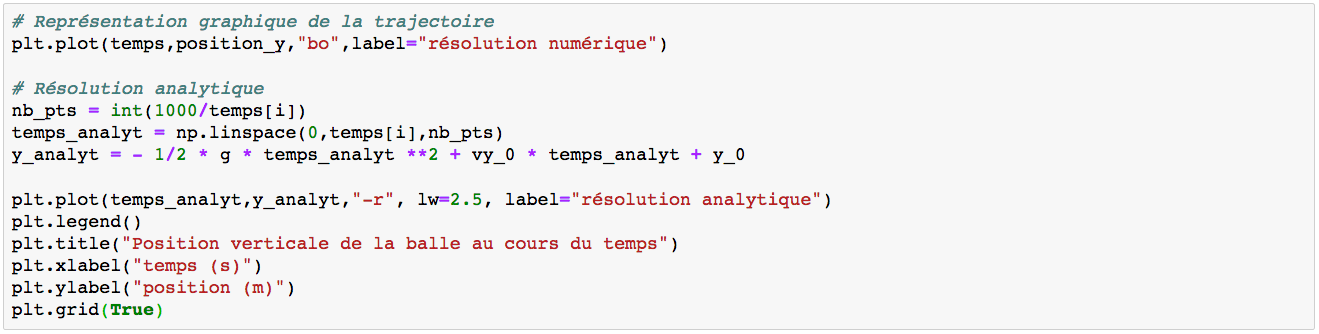
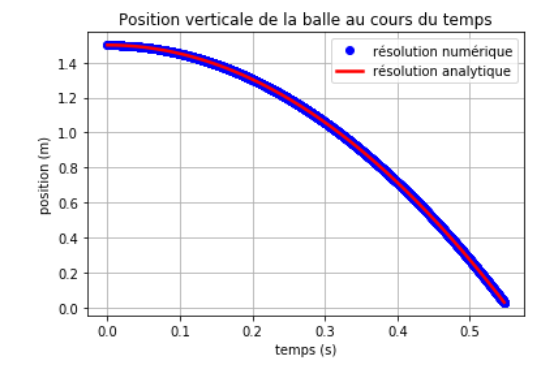
De la même manière, on trace la représentation graphique de la position de la balle en fonction du temps, figures 10 et 11.
Programmes python :
Télécharger le programme python Chute-libre-1.py, sans l'utilisation des listes.
Télécharger le programme python Chute-libre-l-1.py, avec l'utilisation des listes.
Télécharger le programme python au format Jupyter Notebook Chute-libre-1.ipynb
Pour citer cet article :
Résolution numérique en langage python : la chute libre - sans rebond - introduction aux listes, Delphine Chareyron, janvier 2020. CultureSciences Physique - ISSN 2554-876X, https://culturesciencesphysique.ens-lyon.fr/ressource/chute-libre-python-1.xml